



Book

Introduction to autonomous mobile robots 2nd Edition (hardback)
A Bradford Book, The MIT Press, ISBN: 978-0-262-01535-6, February, 2011
Patents

Peer-Reviewed Papers
2025
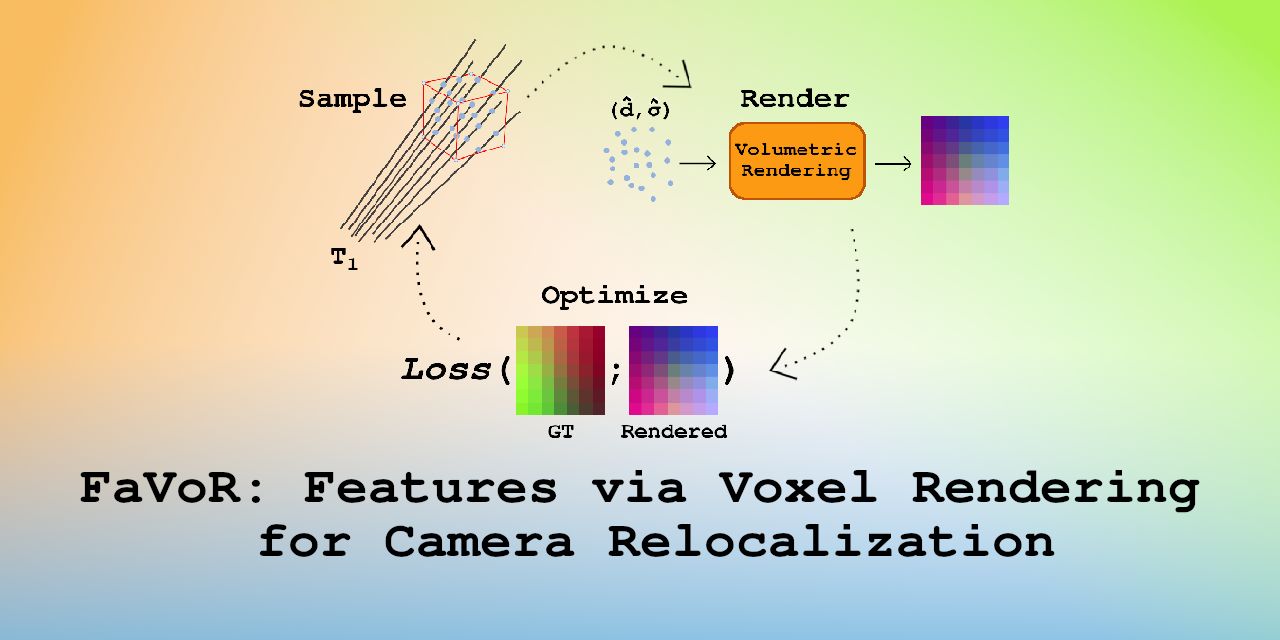
FaVoR: Features via Voxel Rendering for Camera Relocalization
IEEE/CVF Winter Conference on Applications of Computer Vision (WACV), Tucson, Arizona, 2025.
2024
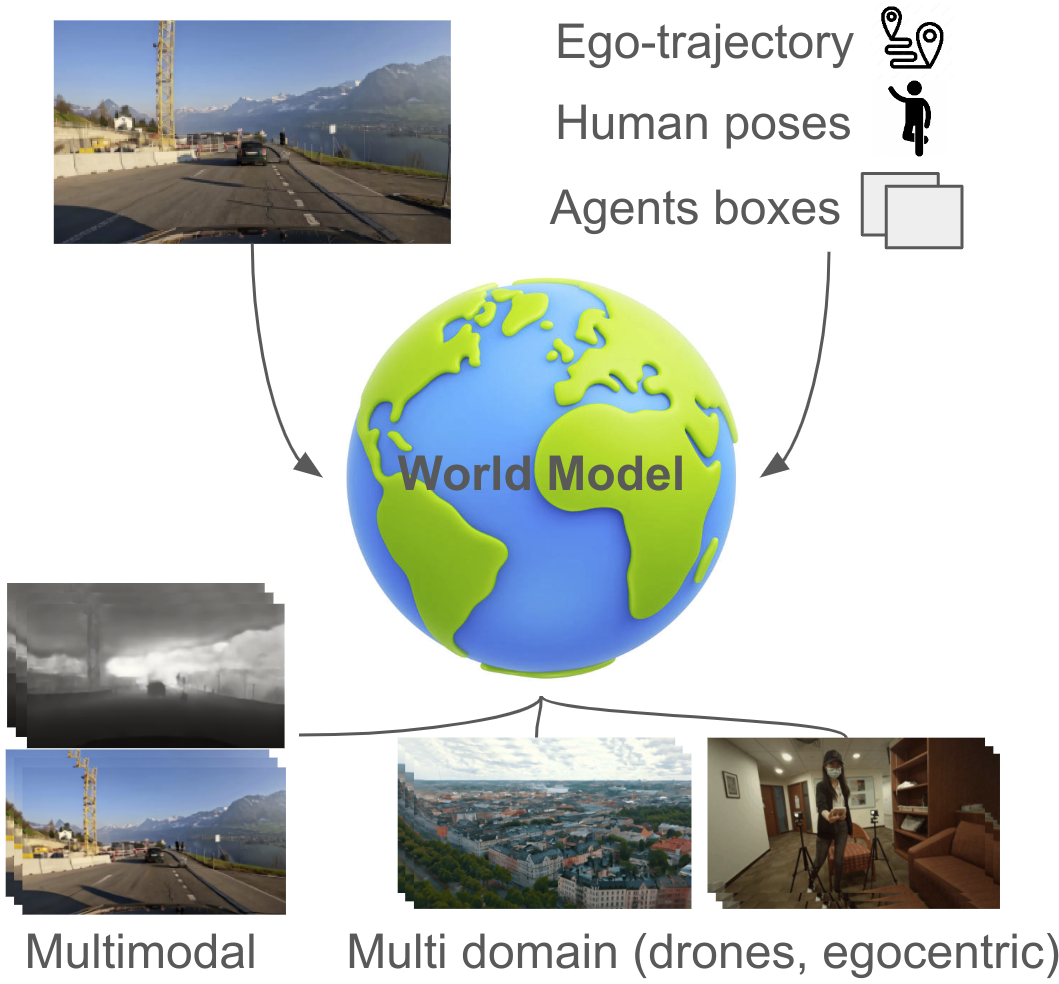
GEM: A Generalizable Ego-Vision Multimodal World Model for Fine-Grained Ego-Motion, Object Dynamics, and Scene Composition Control
ArXiv, 2024.

Multi-task Reinforcement Learning for Quadrotors
IEEE Robotics and Automation Letter (RA-L), 2024.
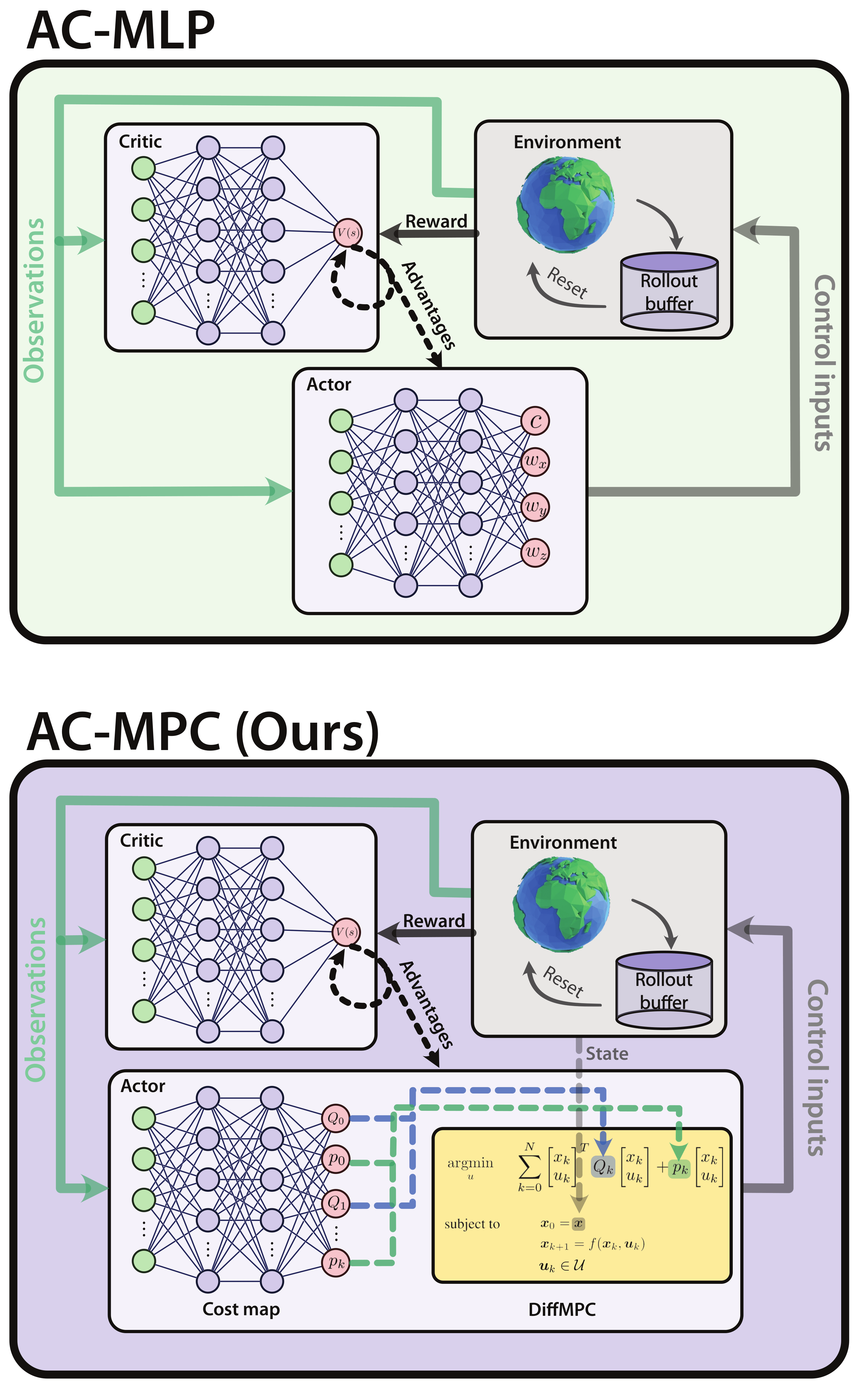
Actor-Critic Model Predictive Control: Differentiable Optimization meets Reinforcement Learning
Arxiv, 2024.
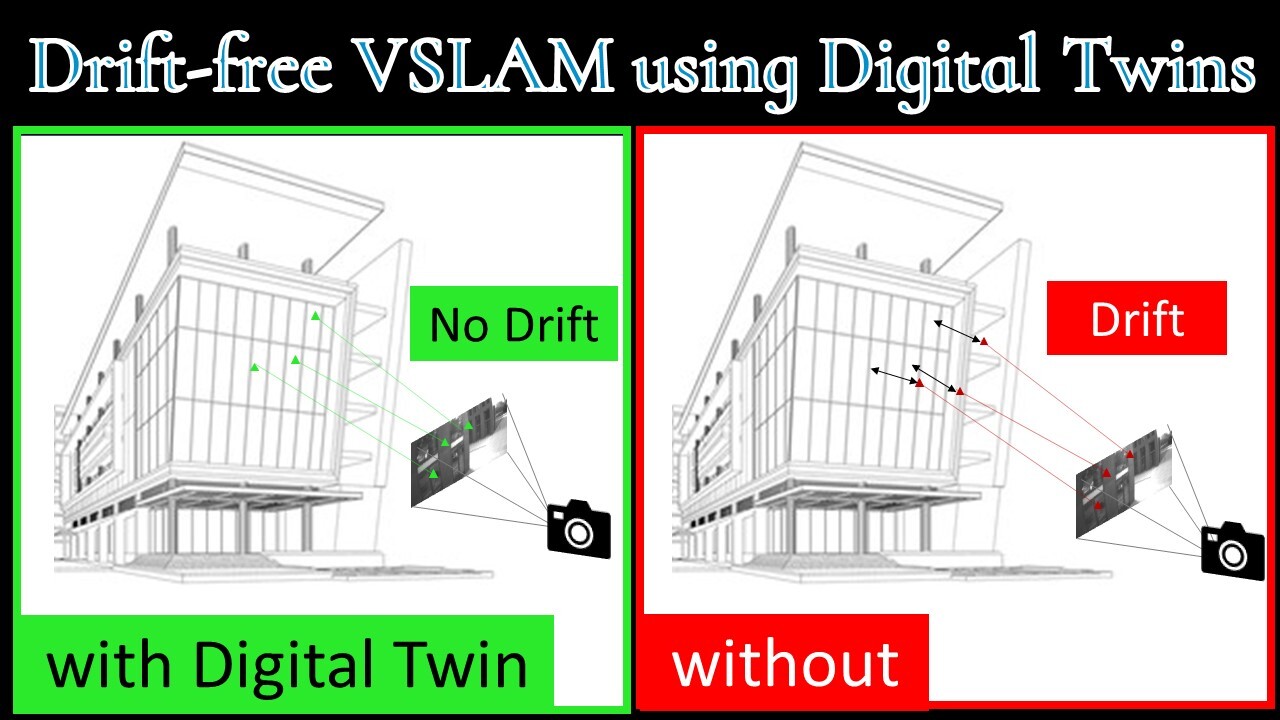
Drift-free Visual SLAM using Digital Twins
IEEE Robotics and Automation Letters (RA-L), 2024.

Robotics meets Fluid Dynamics: A Characterization of the Induced Airflow around a Quadrotor
IEEE Robotics and Automation Letters (RA-L), 2024.

Hilti SLAM Challenge 2023: Benchmarking Single + Multi-session SLAM across Sensor Constellations in Construction
IEEE Robotics and Automation Letters, Vol. 9, Issue 8, 2024.
Bootstrapping Reinforcement Learning with Imitation for Vision-Based Agile Flight
Conference on Robot Learning (CoRL), 2024
Monocular Event-Based Vision for Obstacle Avoidance with a Quadrotor
Conference on Robot Learning (CoRL), 2024

Learning Quadruped Locomotion Using Differentiable Simulation
Conference on Robot Learning (CoRL), 2024
Oral Presentation.
Learning to Walk and Fly with Adversarial Motion Priors
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024
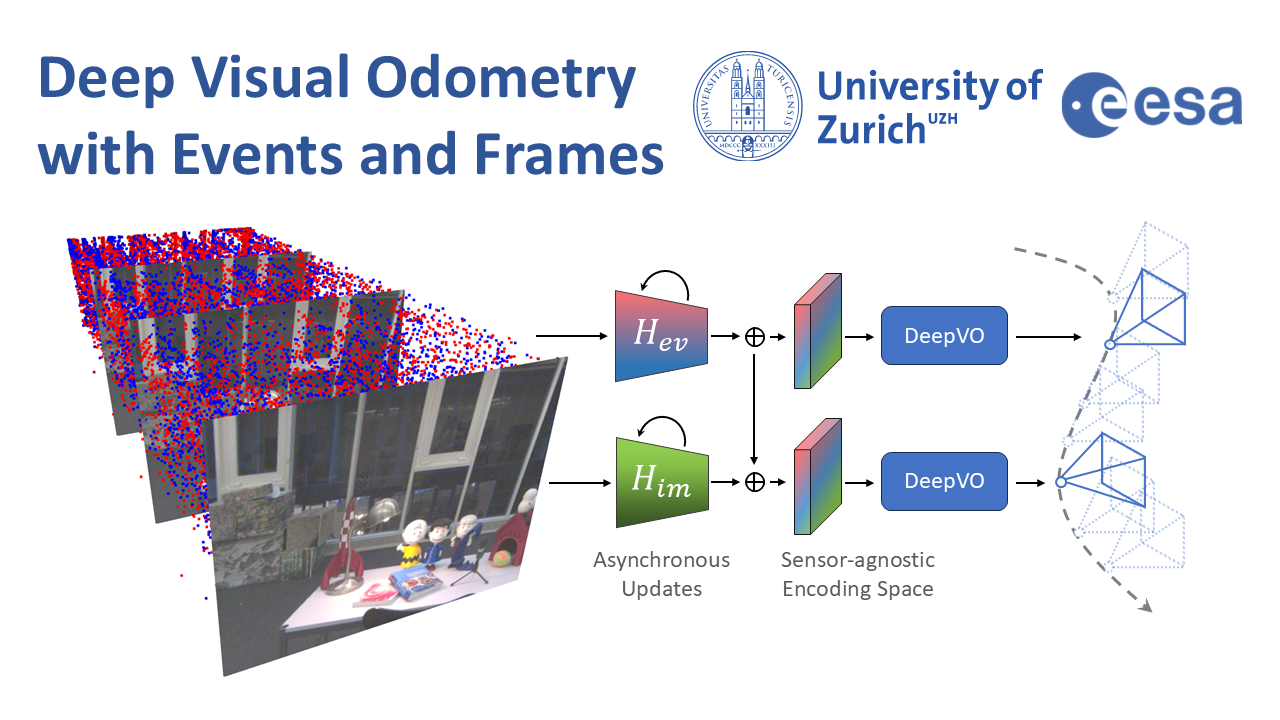
Deep Visual Odometry with Events and Frames
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024.
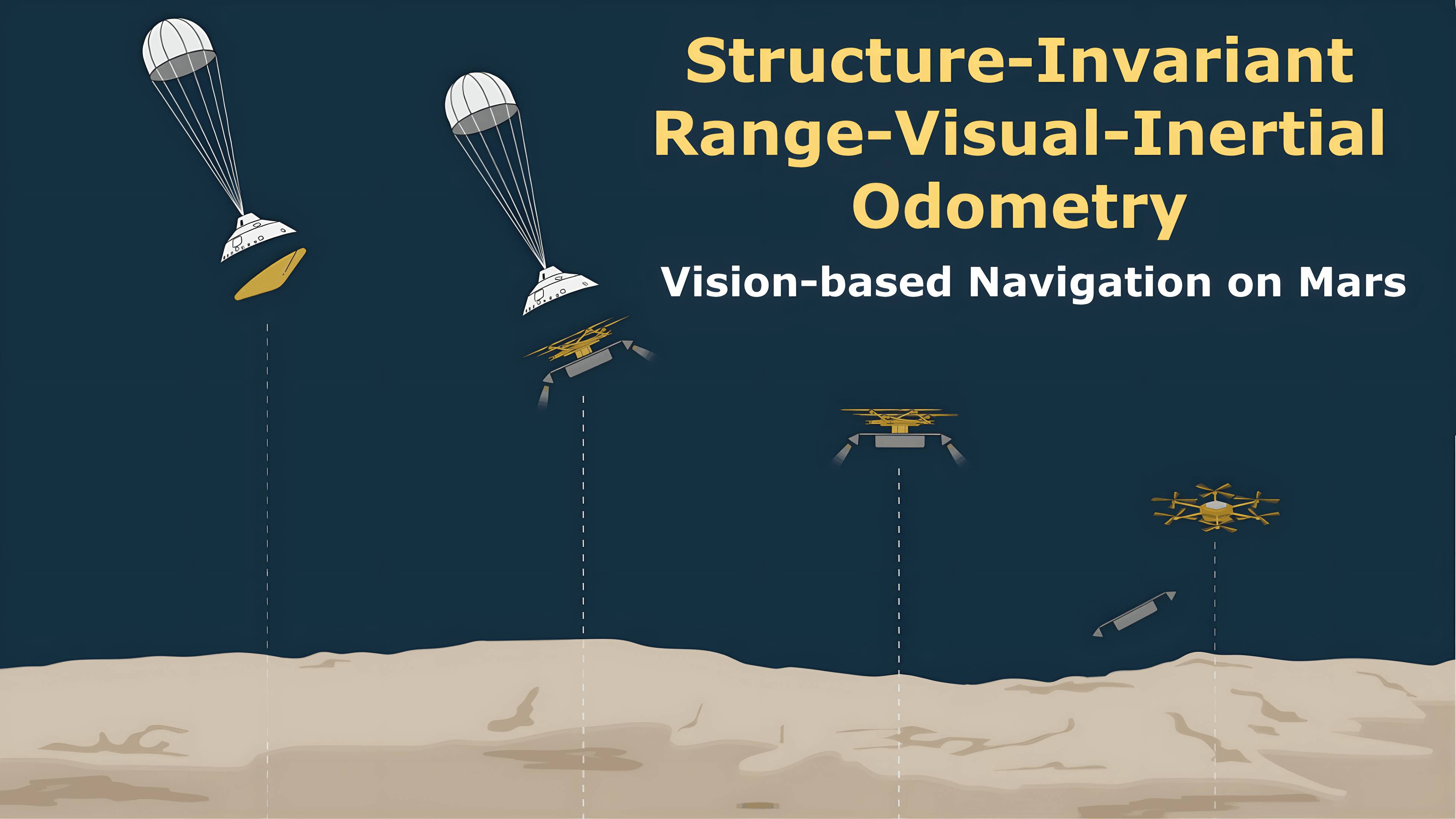
Structure-Invariant Range-Visual-Inertial Odometry
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2024.

Reinforcement Learning Meets Visual Odometry
European Conference on Computer Vision (ECCV), 2024.
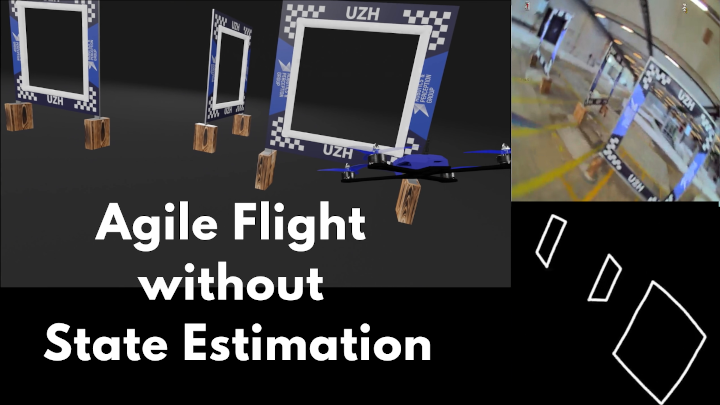
Demonstrating Agile Flight from Pixels without State Estimation
Robotics: Science and Systems (RSS), 2024.
Best Demo Paper Award!
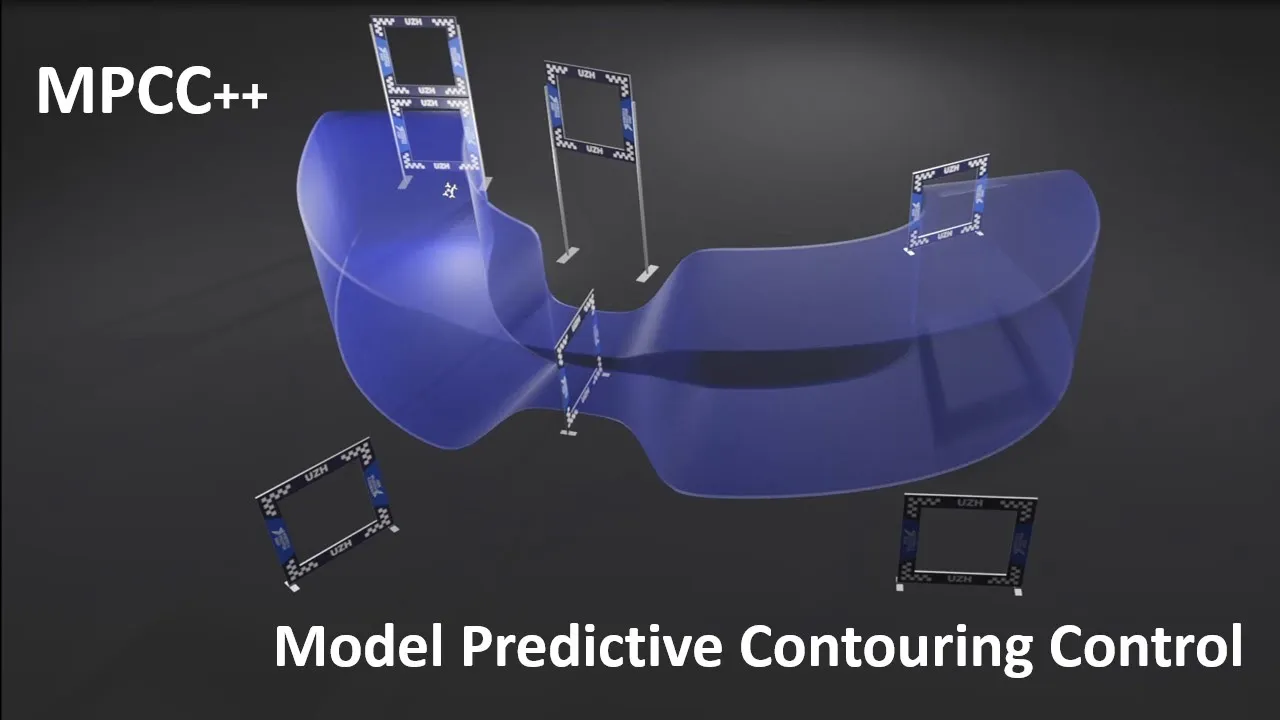
MPCC++: Model Predictive Contouring Control for Time-Optimal Flight with Safety Constraints
Robotics: Science and Systems (RSS), 2024.
Low Latency Automotive Vision with Event Cameras
Nature, 2024.



A Hybrid ANN-SNN Architecture for Low-Power and Low-Latency Visual Perception
IEEE Conference on Computer Vision and Pattern Recognition Workshops(CVPRW), 2024.
Winner of the University of Zurich Best Master Thesis Award.


State Space Models for Event Cameras
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, 2024.
Spotlight Presentation.

An N-Point Linear Solver for Line and Motion Estimation with Event Cameras
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, 2024.
Oral Presentation.

Mitigating Motion Blur in Neural Radiance Fields with Events and Frames
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, 2024.

Actor-Critic Model Predictive Control
IEEE International Conference on Robotics and Automation (ICRA), Yokohama, 2024.

Contrastive Learning for Enhancing Robust Scene Transfer in Vision-based Agile Flight
IEEE International Conference on Robotics and Automation (ICRA), Yokohama, 2024.

Contrastive Initial State Buffer for Reinforcement Learning
IEEE International Conference on Robotics and Automation (ICRA), Yokohama, 2024.

Dense Continuous-Time Optical Flow from Events and Frames
IEEE Transactions on Pattern Analysis and Machine Intelligence (TPAMI), 2024.

AERIAL-CORE: AI-Powered Aerial Robots for Inspection and Maintenance of Electrical Power Infrastructures
Arxiv, 2024.
2023
E-Calib: A Fast, Robust and Accurate Calibration Toolbox for Event Cameras
IEEE Transctions on Image Processing, 2023.



A 5-Point Minimal Solver for Event Camera Relative Motion Estimation
IEEE/CVF International Conference on Computer Vision (ICCV), 2023.
Oral Presentation.

Reaching the Limit in Autonomous Racing: Optimal Control vs. Reinforcement Learning
Science Robotics, 2023

Champion-level Drone Racing using Deep Reinforcement Learning
Nature, 2023

Real-time Neural MPC: Deep Learning Model Predictive Control for Quadrotors and Agile Robotic Platforms
IEEE Robotics and Automation Letters (RA-L), 2023.

From Chaos Comes Order: Ordering Event Representations for Object Recognition and Detection
IEEE/CVF International Conference on Computer Vision (ICCV), 2023

Autonomous Power Line Inspection with Drones via Perception-Aware MPC
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023.
Best Paper Award!

Learning Deep Sensorimotor Policies for Vision-based Autonomous Drone Racing
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), 2023.


Microgravity induces overconfidence in perceptual decision-making
Nature Scientific Reports, 2023.

HDVIO: Improving Localization and Disturbance Estimation with Hybrid Dynamics VIO
Robotics: Science and Systems (RSS), 2023.

Revisiting Token Pruning for Object Detection and Instance Segmentation
IEEE Winter Conference on Applications of Computer Vision (WACV), 2024.

Data-driven Feature Tracking for Event Cameras
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023.
Award Candidate.

Neuromorphic Optical Flow and Real-time Implementation with Event Cameras
IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), 2023.

Recurrent Vision Transformers for Object Detection with Event Cameras
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023.

Event-based Shape from Polarization
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2023.

Training Efficient Controllers via Analytic Policy Gradient
IEEE International Conference on Robotics and Automation (ICRA), London, 2023

Event-based Agile Object Catching with a Quadrupedal Robot
IEEE International Conference on Robotics and Automation (ICRA), London, 2023

Weighted Maximum Likelihood for Controller Tuning
IEEE International Conference on Robotics and Automation (ICRA), London, 2023

Learning Perception-Aware Agile Flight in Cluttered Environments
IEEE International Conference on Robotics and Automation (ICRA), London, 2023

User-Conditioned Neural Control Policies for Mobile Robotics
IEEE International Conference on Robotics and Automation (ICRA), London, 2023

E-NeRF: Neural Radiance Fields from a Moving Event Camera
IEEE Robotics and Automation Letters (RA-L), 2023.

Learned Inertial Odometry for Autonomous Drone Racing
IEEE Robotics and Automation Letters (RA-L), 2023.

Hilti-Oxford Dataset: A Millimeter-Accurate Benchmark for Simultaneous Localization and Mapping
IEEE Robotics and Automation Letters (RA-L), 2023.

Agilicious: Open-Source and Open-Hardware Agile Quadrotor for Vision-Based Flight
Science Robotics, 2022.
2022
Improving safety in physical human-robot collaboration via deep metric learning
IEEE 27th International Conference on Emerging Technologies and Factory Automation (ETFA), 2022.
COVERED, CollabOratiVE Robot Environment Dataset for 3D Semantic segmentation
2022 IEEE 27th International Conference on Emerging Technologies and Factory Automation (ETFA), 2022.


ESS: Learning Event-based Semantic Segmentation from Still Images
European Conference on Computer Vision (ECCV), Tel Aviv, 2022.

Data-Efficient Collaborative Decentralized Thermal-Inertial Odometry
IEEE Robotics and Automation Letters (RA-L), 2022

Exploring Event Camera-based Odometry for Planetary Robots
IEEE Robotics and Automation Letters (RAL), 2022

Time-optimal Online Replanning for Agile Quadrotor Flight
IEEE Robotics and Automation Letters (RA-L), 2022.

Learning Minimum-Time Flight in Cluttered Environments
IEEE Robotics and Automation Letters (RA-L), 2022.

A Comparative Study of Nonlinear MPC and Differential-Flatness-Based Control for Quadrotor Agile Flight
IEEE Transactions on Robotics, 2022


Time Lens++: Event-based Frame Interpolation with Parametric Non-linear Flow and Multi-scale Fusion
IEEE Conference of Computer Vision and Pattern Recognition (CVPR), 2022, New Orleans, USA.

AEGNN: Asynchronous Event-based Graph Neural Networks
IEEE Conference of Computer Vision and Pattern Recognition (CVPR), 2022, New Orleans, USA.

Event-aided Direct Sparse Odometry
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), 2022.
Oral Presentation.

Model Predictive Contouring Control for Time-Optimal Quadrotor Flight
IEEE Transactions on Robotics, 2022

Multi-Bracket High Dynamic Range Imaging with Event Cameras
IEEE Conference on Computer Vision and Pattern Recognition Workshop (CVPRW), New Orleans, 2022.


Policy Search for Model Predictive Control with Application for Agile Drone Flight
IEEE Transactions on Robotics (T-RO), 2022.

Visual Attention Prediction Improves Performance of Autonomous Drone Racing Agents
PLOS ONE, 2022

Minimum-Time Quadrotor Waypoint Flight in Cluttered Environments
Robotics and Automation Letters (RAL), 2022

A Benchmark Comparison of Learned Control Policies for Agile Quadrotor Flight
IEEE International Conference on Robotics and Automation (ICRA), Philadelphia, 2022

Continuous-Time vs. Discrete-Time Vision-based SLAM: A Comparative Study
Robotics and Automation Letters (RAL), 2022

Agile Aerial Autonomy: Planning and Control
PhD Thesis, University of Zurich, February 2022
Advisor: Prof. Davide Scaramuzza.
Committee: Prof. Moritz Diehl, Prof. Luca Carlone, Prof. Roland Siegwart.

Nonlinear MPC for Quadrotor Fault-Tolerant Control
Robotics and Automation Letters (RAL), 2022
Winner of ETH Zurich Medal for Best Master Thesis in Robotics.

Bridging the Gap between Events and Frames through Unsupervised Domain Adaptation
Robotics and Automation Letters (RAL), 2022

AutoTune: Controller Tuning for High-Speed Flight
Robotics and Automation Letters (RAL), 2022

Perception-Aware Perching on Powerlines with Multirotors
Robotics and Automation Letters (RAL), 2022

Range, Endurance, and Optimal Speed Estimates for Multicopters
Robotics and Automation Letters (RAL), 2022
2021

Geometry-aware Compensation Scheme for Morphing Drones
IEEE International Conference on Robotics and Automation (ICRA), Xi'an, 2021.

Unsupervised Feature Learning for Event Data: Direct vs Inverse Problem Formulation
IAPR IEEE/Computer Society International Conference on Pattern Recognition (ICPR), Milan, 2021.

Performance, Precision, and Payloads: Adaptive Nonlinear MPC for Quadrotors
IEEE Robotics and Automation Letters (RA-L), 2021.

ESL: Event-based Structured Light
IEEE International Conference on 3D Vision (3DV), 2021

Decentralized Multi-Agent Visual SLAM
PhD Thesis, University of Zurich, December 2020
Advisor: Prof. Davide Scaramuzza.
Committee: Prof. Marc Pollefeys, Prof. Torsten Sattler.

Learning Agile Robot Navigation
PhD Thesis, University of Zurich, July 2021
Advisor: Prof. Davide Scaramuzza.
Committee: Prof. Roland Siegwart, Prof. Angela Schoellig, Prof. Pieter Abbeel.


Learning High-Speed Flight in the Wild
Science Robotics, 2021.


E-RAFT: Dense Optical Flow from Event Cameras
International Conference on 3D Vision (3DV), 2021.

AlphaPilot: Autonomous Drone Racing
Autonomous Robots (AuRo), 2021
Best Systems Paper Award!

Powerline Tracking with Event Cameras
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, 2021.

Event-driven Vision and Control for UAVs on a Neuromorphic Chip
IEEE International Conference on Robotics and Automation (ICRA), Xi'an, 2021.

Autonomous Drone Racing with Deep Reinforcement Learning
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Prague, 2021.
Time-Optimal Planning for Quadrotor Waypoint Flight
Science Robotics, July 21, 2021.

NeuroBEM: Hybrid Aerodynamic Quadrotor Model
Robotics: Science and Systems (RSS), 2021.

Time Lens: Event-based Video Frame Interpolation
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Nashville, 2021.

How to Calibrate Your Event Camera
IEEE Conference on Computer Vision and Pattern Recognition Workshop (CVPRW), Nashville, 2021.

Autonomous Overtaking in Gran Turismo Sport Using Curriculum Reinforcement Learning
International Conference on Robotics and Automation (ICRA), 2021.

Super-Human Performance in Gran Turismo Sport Using Deep Reinforcement Learning
IEEE Robotics and Automation Letters (RA-L), 2021.

DSEC: A Stereo Event Camera Dataset for Driving Scenarios
IEEE Robotics and Automation Letters (RA-L), 2021.
PDF Project Page and Dataset Code Teaser ICRA 2021 Video Pitch Slides

Human-Piloted Drone Racing: Visual Processing and Control
IEEE Robotics and Automation Letters (RA-L), 2021.

Combining Events and Frames using Recurrent Asynchronous Multimodal Networks for Monocular Depth Prediction
IEEE Robotics and Automation Letters (RA-L), 2021.
NCCR Robotics Best Master Thesis Award


Autonomous Quadrotor Flight despite Rotor Failure with Onboard Vision Sensors: Frames vs. Events
IEEE Robotics and Automation Letters (RA-L), 2021.
Best Paper Award!
2020

Reference Pose Generation for Long-term Visual Localization via Learned
Features
and View Synthesis
International Journal of Computer Vision (IJCV), 2020.

Primal-Dual Mesh Convolutional Neural Networks
Conference on Neural Information Processing Systems (NeurIPS), 2020

Learning Monocular Dense Depth from Events
IEEE International Conference on 3D Vision (3DV), Fukuoka, 2020

Active Robot Vision: from State Estimation to Motion Planning
PhD Thesis, University of Zurich, July 2020
Advisor: Prof. Davide Scaramuzza.
Committee: Prof. Margarita Chli, Prof. Timothy Barfoot, Prof. Frank Dellaert, Prof. Michael Kaess.

Flightmare: A Flexible Quadrotor Simulator
Conference on Robot Learning (CoRL), 2020

Online Weight-adaptive Nonlinear Model Predictive Control
International Conference on Intelligent Robots and Systems (IROS), Las Vegas, 2020.
Fisher Information Field: an Efficient and Differentiable Map for Perception-aware Planning
arXiv preprint, 2020.

Event-based Asynchronous Sparse Convolutional Networks
European Conference on Computer Vision (ECCV), Glasgow, 2020.

Reducing the Sim-to-Real Gap for Event Cameras
European Conference on Computer Vision (ECCV), Glasgow, 2020.

Learning High-Level Policies for Model Predictive Control
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, 2020.

Augmenting Visual Place Recognition with Structural Cues
IEEE Robotics and Automation Letters (RA-L), 2020.

Faster than FAST: GPU-Accelerated Frontend for High-Speed VIO
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, 2020.

Learning Depth With Very Sparse Supervision
IEEE Robotics and Automation Letters, 2020.

Event-based Vision: A Survey
IEEE Transactions on Pattern Analysis and Machine Intelligence, 2020.

Tightly-coupled Fusion of Global Positional Measurements in Optimization-based Visual-Inertial Odometry
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Las Vegas, 2020.

Deep Drone Acrobatics
Robotics: Science and Systems (RSS), 2020
Best Paper Nominee!
AlphaPilot: Autonomous Drone Racing
Robotics: Science and Systems (RSS), 2020
Best Systems Paper Award!


Dynamic Obstacle Avoidance for Quadrotors with Event Cameras
Science Robotics, March 18, 2020.
PDF (Free of Access: from the Science webpage click pn PDF and then Download PDF) Supplementary Material YouTube

EVDodgeNet: Deep Dynamic Obstacle Dodging with event cameras
IEEE International Conference on Robotics and Automation (ICRA), 2020

Towards Low-Latency High-Bandwidth Control of Quadrotors using Event Cameras
IEEE International Conference on Robotics and Automation (ICRA), 2020

Event-Based Angular Velocity Regression with Spiking Networks
IEEE International Conference on Robotics and Automation (ICRA), 2020.

Voxel Map for Visual SLAM
IEEE International Conference on Robotics and Automation (ICRA), 2020.

Redesigning SLAM for Arbitrary Multi-Camera Systems
IEEE International Conference on Robotics and Automation (ICRA), 2020.

A General Framework for Uncertainty Estimation in Deep Learning
IEEE Robotics and Automation Letters, 2020.

High Speed and High Dynamic Range Video with an Event Camera
IEEE Transactions on Pattern Analysis and Machine Intelligence, 2020.
Fast Image Reconstruction with an Event Camera
IEEE Winter Conference on Applications of Computer Vision (WACV), 2020.

Video to Events: Recycling Video Dataset for Event Cameras
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Seattle, 2020.
2019
Event Cameras: from SLAM to High Speed Video
PhD Thesis, University of Zurich, November 2019
Advisor: Prof. Davide Scaramuzza.
Committee: Prof. Andrew Davison, Prof. Tobi Delbruck, Prof. Bernt Schiele.

Agile, Vision-Based Quadrotor Flight: from Active, Low-Latency Perception to Adaptive Morphology
PhD Thesis, University of Zurich, December 2019
Advisor: Prof. Davide Scaramuzza.
Committee: Prof. Roland Siegwart, Prof. Sami Haddadin, Prof. Nathan Michael.

Deep Drone Racing: From Simulation to Reality with Domain Randomization
IEEE Transactions on Robotics, 2019
TRO Best Paper Award Honorable Mention!
PDF YouTube 1 YouTube 2 Code
Exploration Without Global Consistency Using Local Volume Consolidation
IFRR International Symposium on Robotics Research (ISRR), Hanoi, 2019.

SIPs: Succinct Interest Points from Unsupervised Inlierness Probability Learning
IEEE International Conference on 3D Vision (3DV), 2019.

Event-Based Motion Segmentation by Motion Compensation
IEEE International Conference on Computer Vision (ICCV), 2019.

End-to-End Learning of Representations for Asynchronous Event-Based Data
IEEE International Conference on Computer Vision (ICCV), 2019.

EKLT: Asynchronous, Photometric Feature Tracking using Events and Frames
International Journal of Computer Vision (IJCV), 2019.


Matching Features without Descriptors:
Implicitly Matched Interest
Points
British Machine Vision Conference (BMVC), Cardiff, 2019.

Rethinking Trajectory Evaluation for SLAM: a Probabilistic, Continuous-Time Approach
ICRA19 Workshop on Dataset Generation and Benchmarking of SLAM Algorithms for Robotics and VR/AR
Best Paper Award!

VIMO: Simultaneous Visual Inertial Model-based Odometry and Force Estimation
Robotics: Science and Systems (RSS), Freiburg, 2019
PDF, Code, YouTube
A 64mW DNN-based Visual Navigation Engine for Autonomous Nano-Drones
IEEE Internet of Things Journal, 2019
Video, PDF, Code
Pedicle screw navigation using surface digitization on the Microsoft HoloLens
Springer International Journal of Computer Assisted Radiology and Surgery, 2019.

CED: Color Event Camera Dataset
IEEE Conference on Computer Vision and Pattern Recognition Workshops (CVPRW), 2019.

Focus Is All You Need: Loss Functions for Event-based Vision
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, 2019.
Events-to-Video: Bringing Modern Computer Vision to Event Cameras
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, 2019.

Unsupervised Moving Object Detection via Contextual Information Separation
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Long Beach, 2019.

Are We Ready for Autonomous Drone Racing? The UZH-FPV Drone Racing Dataset
IEEE International Conference on Robotics and Automation (ICRA), 2019.

Beyond Point Clouds: Fisher Information Field for Active Visual Localization
IEEE International Conference on Robotics and Automation (ICRA), 2019.

Event-based, Direct Camera Tracking from a Photometric 3D Map using Nonlinear Optimization
IEEE International Conference on Robotics and Automation (ICRA), 2019.
The Foldable Drone: A Morphing Quadrotor that can Squeeze and Fly
IEEE Robotics and Automation Letters (RA-L), 2019.

How Fast is Too Fast? The Role of Perception Latency in High-Speed Sense and Avoid
IEEE Robotics and Automation Letters (RA-L), 2019.

PL-SLAM: a Stereo SLAM System through the Combination of Points and Line Segments
IEEE Transactions on Robotics, 2019

Challenges and implemented technologies used in autonomous drone racing
Springer: Intelligent Service Robotics Series

Beauty and the Beast: Optimal Methods Meet Learning for Drone Racing.
This approach was used to win the IROS 2018 Autonomous Drone Race.
IEEE International Conference on Robotics and Automation (ICRA), 2019.
2018

ESIM: an Open Event Camera Simulator
Conference on Robot Learning (CoRL), Zurich, 2018.

Deep Drone Racing: Learning Agile Flight in Dynamic Environments
Conference on Robotic Learning (CoRL), Zurich, 2018.
Best Systems Paper Award!
Oral Presentation. Oral Acceptance Rate: 4.0%.
Asynchronous, Photometric Feature Tracking using Events and Frames
European Conference on Computer Vision (ECCV), Munich, 2018.
Oral Presentation. Oral Acceptance Rate: 2.4%.
PDF Poster YouTube Oral presentation Evaluation Code Tracking Code

Semi-Dense 3D Reconstruction with a Stereo Event Camera
European Conference on Computer Vision (ECCV), Munich, 2018.

Computing The Forward Reachable Set for a Multirotor Under First-Order Aerodynamic Effects
IEEE Robotics and Automation Letters (RA-L), 2018.

Quadrotor Control for Accurate Agile Flight
PhD Thesis, University of Zurich, April 2018.
Advisor: Prof. Davide Scaramuzza.
Committee: Prof. Anibal Ollero, HDR. Dr. Antonio Franchi.


A Real-Time Game Theoretic Planner for Autonomous Two-Player Drone Racing
Robotics: Science and Systems (RSS), Pittsburgh, 2018

Fast, Autonomous Flight in GPS-denied and Cluttered Environments
Journal of Field Robotics, 2018, Vol. 35, Issue 1.

Learning to Control Drones in Natural Environments: A Survey
ICRA18 Workshop on Perception, Inference, and Learning
PDF
A Tutorial on Quantitative Trajectory Evaluation for Visual(-Inertial) Odometry
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, 2018.

On the Comparison of Gauge Freedom Handling in Optimization-based Visual-Inertial State Estimation
IEEE Robotics and Automation Letters (RA-L), 2018.

PAMPC: Perception-Aware Model Predictive Control for Quadrotors
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Madrid, 2018.

A Unifying Contrast Maximization Framework for Event Cameras, with Applications to Motion, Depth and Optical Flow Estimation
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, 2018.
Spotlight Presentation.

Event-based Vision meets Deep Learning on Steering Prediction for Self-driving Cars
IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Salt Lake City, 2018.

Data-Efficient Decentralized Visual SLAM
IEEE International Conference on Robotics and Automation (ICRA), 2018.

Perception-aware Receding Horizon Navigation for MAVs
IEEE International Conference on Robotics and Automation (ICRA), 2018.

A Benchmark Comparison of Monocular Visual-Inertial Odometry Algorithms for Flying Robots
IEEE International Conference on Robotics and Automation (ICRA), 2018.
PDF Video PPT Interactive Graphs
Onboard State Dependent LQR for Agile Quadrotors
IEEE International Conference on Robotics and Automation (ICRA), 2018.
PDF Video ICRA18 Video Pitch PPTDroNet: Learning to Fly by Driving
IEEE Robotics and Automation Letters (RA-L), 2018.
PDF YouTube Software and Datasets
Ultimate SLAM? Combining Events, Images, and IMU for Robust Visual SLAM in HDR and High Speed Scenarios
IEEE Robotics and Automation Letters (RA-L), 2018.
Best Paper Award finalist (2nd out of 720 papers)!
PDF YouTube ICRA18 Video Pitch Poster Results (raw trajectories) Project Webpage Source Code

Learning-based Image Enhancement for Visual Odometry in Challenging HDR Environments
IEEE International Conference on Robotics and Automation (ICRA), 2018.
Differential Flatness of Quadrotor Dynamics Subject to Rotor Drag for Accurate Tracking of High-Speed Trajectories
IEEE Robotics and Automation Letters (RA-L), 2018.
Event-based, 6-DOF Camera Tracking from Photometric Depth Maps
IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol 40, Issue 10, 2018.

Special Issue on High-Speed Vision-Based Autonomous Navigation of UAVs
Journal of Field Robotics, 2018.
2017

EMVS: Event-Based Multi-View Stereo - 3D Reconstruction with an Event Camera in Real-Time
International Journal of Computer Vision, 2017.

Efficient Decentralized Visual Place Recognition From Full-Image Descriptors
IEEE MRS 2017: the 1st International Symposium on Multi-Robot and Multi-Agent Systems

Real-time Visual-Inertial Odometry for Event Cameras using Keyframe-based Nonlinear Optimization
British Machine Vision Conference (BMVC), London, 2017.
Oral Presentation. Oral acceptance Rate: 5.6%
PDF PPT YouTube Oral Presentation Results (raw trajectories)

Vision-based Autonomous Quadrotor Landing on a Moving Platform
IEEE/RSJ International Symposium on Safety, Security and Rescue Robotics (SSRR), Shanghai, 2017.

Rapid Exploration with Multi-Rotors: A Frontier Selection Method for High Speed Flight
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, 2017.
IROS'17 Best Search and Rescue Robotics Paper Award Finalist!

Place Recognition in Semi-Dense Maps: Geometric and Learning-Based Approaches
British Machine Vision Conference (BMVC), London, 2017.

Fast Event-based Corner Detection
British Machine Vision Conference (BMVC), London, 2017.

Event-based Vision for High-Speed Robotics
PhD Thesis, University of Zurich, July 2017.
Advisor: Prof. Davide Scaramuzza.
Committee: Prof. Tobi Delbruck, Prof. Kostas Daniilidis.

Exploiting Photometric Information for Planning under Uncertainty
Springer Tracts in Advanced Robotics (International Symposium on Robotic Research), 2017.
PDF PDF of longer paper version (Technical report) PPT YouTube

Fast Trajectory Optimization for Agile Quadrotor Maneuvers with a Cable-Suspended Payload
Robotics: Science and Systems (RSS), Boston, 2017.
RSS'17 Best Student Paper Award Finalist! Oral Presentation.

Independent Motion Detection with Event-driven Cameras
International Conference on Advanced Robotics (ICAR), Hong Kong, 2017.

A comparison of volumetric information gain metrics for active 3D object reconstruction
Autonomous Robots, April 2017

The Zurich Urban Micro Aerial Vehicle Dataset
International Journal of Robotics Research, April 2017

Active Exposure Control for Robust Visual Odometry in HDR Environments
IEEE International Conference on Robotics and Automation (ICRA), 2017.

Dynamic Collaboration without Communication: Vision-Based Cable-Suspended Load Transport with Two Quadrotors
IEEE International Conference on Robotics and Automation (ICRA), 2017.

Towards Domain Independence for Learning-Based Monocular Depth Estimation
IEEE Robotics and Automation Letters (RA-L), 2017.
Thrust Mixing, Saturation, and Body-Rate Control for Accurate Aggressive Quadrotor Flight
IEEE Robotics and Automation Letters (RA-L), Vol. 2, Issue 2, pp. 476-482, Apr. 2017.

Efficient Decentralized Visual Place Recognition Using a Distributed Inverted Index
IEEE Robotics and Automation Letters (RA-L), Vol. 2, Issue 2, pp. 640-647, Apr. 2017.

Active Autonomous Aerial Exploration for Ground Robot Path Planning
IEEE Robotics and Automation Letters (RA-L), Vol. 2, Issue 2, pp. 664-671, Apr. 2017.

EVO: A Geometric Approach to Event-based 6-DOF Parallel Tracking and Mapping in Real-time
IEEE Robotics and Automation Letters (RA-L), Vol. 2, Issue 2, pp. 593-600, Apr. 2017.

Accurate Angular Velocity Estimation with an Event Camera
IEEE Robotics and Automation Letters (RA-L), Vol. 2, Issue 2, pp. 632-639, Apr. 2017.

Aggressive Quadrotor Flight through Narrow Gaps with Onboard Sensing and Computing using Active Vision
IEEE International Conference on Robotics and Automation (ICRA), 2017.

SVO: Semi-Direct Visual Odometry for Monocular and Multi-Camera Systems
IEEE Transactions on Robotics, Vol. 33, Issue 2, pages 249-265, Apr. 2017.
Includes comparison against ORB-SLAM, LSD-SLAM, and DSO and comparison among Dense, Semi-dense, and Sparse Direct Image Alignment.

The Event-Camera Dataset and Simulator: Event-based Data for Pose Estimation, Visual Odometry, and SLAM
International Journal of Robotics Research, Vol. 36, Issue 2, pages 142-149, Feb. 2017.

On-Manifold Preintegration for Real-Time Visual-Inertial Odometry
IEEE Transactions on Robotics, vol 33, no. 1, pp. 1-21, Feb. 2017.
IEEE Transactions on Robotics (TRO) best paper award 2017

Simultaneous State Initialization and Gyroscope Bias Calibration in Visual Inertial Aided Navigation
IEEE Robotics and Automation Letters (RA-L), Vol. 2, Issue 1, pp. 18-25, Jan. 2017.

Application Challenges from a Bird's-Eye View
Computer Vision in Vehicle Technology: land, sea, and air. Wiley, ISBN: 978-1-118-86807-2. Edited by A, Lopez, T. Pajdla, A. Imiya, A. Alvarez. March 2017.

A smartphone application to determine body length for body weight estimation in children: a prospective clinical trial
Journal of Clinical Monitoring and Computing, June 2017
2016

Past, Present, and Future of Simultaneous Localization and Mapping: Toward the Robust-Perception Age
IEEE Transactions on Robotics, Vol. 32, Issue 6, pp. 1309-1332, Dec. 2016.

Collaborative Localization of Aerial and Ground Robots through Elevation Maps
International Symposium on Safety, Security, and Rescue Robotics (SSRR), Lausanne, 2016.

EMVS: Event-based Multi-View Stereo
British Machine Vision Conference (BMVC), York, 2016.
BMVC'16 Best Industry Paper Paper Award! Oral Talk: Acceptance Rate 7%

"On-the-spot Training" for Terrain Classification in Autonomous Air-Ground Collaborative Teams
International Symposium on Experimental Robotics (ISER), Tokyo, 2016.

Low-Latency Visual Odometry using Event-based Feature Tracks
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, 2016.
IROS'16 Best Application Paper Award Finalist! Highlight Talk: Acceptance Rate 2.5%
Feature Detection and Tracking with the Dynamic and Active-pixel Vision Sensor (DAVIS)
International Conference on Event-Based Control, Communication and Signal Processing (EBCCSP), Krakow, 2016.

ELiSeD - An Event-Based Line Segment Detector
International Conference on Event-Based Control, Communication and Signal Processing (EBCCSP), Krakow, 2016.

Visual Inertial Odometry and Dense Reconstruction for Mobile Robots
PhD Thesis, University of Zurich, April 2016.
Advisor: Prof. Davide Scaramuzza.
Committee: Prof. Marc Pollefeys, Dr. Stefan Leutenegger.
Autonomous, Vision-based Flight and Live Dense 3D Mapping with a Quadrotor Micro Aerial Vehicle
Journal of Field Robotics, 2016.

Multi-body Motion Estimation from Monocular Vehicle-Mounted Cameras
IEEE Transactions on Robotics, Vol. 32, Issue 3, pp. 638-651, Jun. 2016.

An Information Gain Formulation for Active Volumetric 3D Reconstruction
IEEE International Conference on Robotics and Automation (ICRA), Stockholm, 2016.

Benefit of Large Field-of-View Cameras for Visual Odometry
IEEE International Conference on Robotics and Automation (ICRA), Stockholm, 2016.
PDF PPT YouTube Research page (datasets and software) C++ omnidirectional camera model

A Machine Learning Approach to Visual Perception of Forest Trails for Mobile Robots
IEEE Robotics and Automation Letters (RA-L), Vol. 1, Issue 2, pp. 661-667, Jul. 2016
NCCR Robotics Most Impactful Paper Award
AAAI'16 Best Video Award finalist!
2015
IMU Preintegration on Manifold for Efficient Visual-Inertial Maximum-a-Posteriori Estimation
Robotics: Science and Systems (RSS), Rome, 2015.
RSS'15 Best Paper Award Finalist! Oral Presentation: Acceptance Rate 4%

Towards Evasive Maneuvers with Quadrotors using Dynamic Vision Sensors
European Conference on Mobile Robots (ECMR), Lincoln, 2015.

Continuous-Time Trajectory Estimation for Event-based Vision Sensors
Robotics: Science and Systems (RSS), Rome, 2015.

Automatic Re-Initialization and Failure Recovery for Aggressive Flight with a Monocular Vision-Based Quadrotor
IEEE International Conference on Robotics and Automation (ICRA), Seattle, 2015.

Continuous On-Board Monocular-Vision-based Elevation Mapping Applied to Autonomous Landing of Micro Aerial Vehicles
IEEE International Conference on Robotics and Automation (ICRA), Seattle, 2015.

Lifetime Estimation of Events from Dynamic Vision Sensors
IEEE International Conference on Robotics and Automation (ICRA), Seattle, 2015.

Air-ground Matching: Appearance-based GPS-denied Urban Localization of Micro Aerial Vehicles
Journal of Field Robotics, Vol. 32, Issue 7, pp. 1015-1039, Oct. 2015.

Nonlinear Ego-Motion Estimation from Optical Flow for Online Control of a Quadrotor UAV
International Journal of Robotics Research, Vol. 34, Issue 8, pp. 1114-1135, May 2015.

Low Computational-Complexity Algorithms for Vision-aided Inertial Navigation of Micro Aerial Vehicles
Robotics and Autonomous Systems Journal, Vol. 69, pp. 80-97, 2015.
2014

Aerial-guided Navigation of a Ground Robot among Movable Obstacles
IEEE International Symposium on Safety, Security, and Rescue Robotics (SSRR), Toyako-cho, 2014.

Event-based, 6-DOF Pose Tracking for High-Speed Maneuvers
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Chicago, 2014.

Appearance-based Active, Monocular, Dense Reconstruction for Micro Aerial Vehicles
Robotics: Science and Systems (RSS), Berkeley, 2014.

Micro Air Vehicle Localization and Position Tracking from Textured 3D Cadastral Models
IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, 2014.

Monocular Simultaneous Multi-Body Motion Segmentation and Reconstruction from Perspective Views
IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, 2014.
SVO: Fast Semi-Direct Monocular Visual Odometry
IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, 2014.
Low-Latency Event-Based Visual Odometry
IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, 2014.

REMODE: Probabilistic, Monocular Dense Reconstruction in Real Time
IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, 2014.

Vision-Controlled Micro Flying Robots: from System Design to Autonomous Navigation and Mapping in GPS-denied Environments.
IEEE Robotics and Automation Magazine, Vol. 21, Issue 3., 2014.

ICP Stereo Visual Odometry for Wheeled Vehicles based on a 1DOF Motion Prior
IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, 2014.
2-Point-based Outlier Rejection for Camera-IMU Systems with applications to Micro Aerial Vehicles
IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, 2014.

A Monocular Pose Estimation System based on Infrared LEDs
IEEE International Conference on Robotics and Automation (ICRA), Hong Kong, 2014.

Omnidirectional Camera
Computer Vision: A Reference Guide, Editors: Katsushi Ikeuchi, ISBN: 978-0-387-30771-8 (Print) 978-0-387-31439-6 (Online), Springer, April, 2014.
2013

Calibration by Correlation using Metric Embedding from Non-metric Similarities
IEEE Transactions on Pattern Analysis and Machine Intelligence, Vol. 35, Issue 10, 2013.

Air-Ground Localization and Map Augmentation Using Monocular Dense Reconstruction
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, 2013.

Collaborative Monocular SLAM with Multiple Micro Aerial Vehicles
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, 2013.
1-Point-based Monocular Motion Estimation for Computationally-Limited Micro Aerial Vehicles
European Conference on Mobile Robotics (ECMR), Barcelona, 2013.
Low-latency localization by Active LED Markers tracking using a Dynamic Vision Sensor
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, 2013.

MAV Urban Localization from Google Street View Data
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Tokyo, 2013.

RFID-Based Hybrid Metric-Topological SLAM for GPS-denied Environments.
IEEE International Conference on Robotics and Automation (ICRA), Karlsruhe, 2013.
2012

Special issue on micro-UAV perception and control
Autonomous Robots, Volume 33, Issue 1-2, pages 173-188, 2012.
Optimal Surveillance Coverage for Teams of Micro Aerial Vehicles in GPS-denied Environments using Onboard Vision
Autonomous Robots, Volume 33, Issue 1-2, pages 173-188, 2012.

Robot Localization Using Soft Object Detection
IEEE International Conference on Robotics and Automation (ICRA), St. Paul, 2012.

Visual odometry: Part II - Matching, robustness, optimization, and applications
IEEE Robotics and Automation Magazine, Volume 19, issue 2, 2012.
2011
| D. Eberli, D. Scaramuzza, S. Weiss, and R. Siegwart. Vision Based Position Control for MAVs Using one Single Circular Landmark. Intelligent and Robotic Systems, Springer, Volume 61, issue 1-4, January, 2011. [ PDF ] | |
| G. Nuetzi, S. Weiss, D. Scaramuzza, and R. Siegwart. Fusion of IMU and Vision for Absolute Scale Estimation in Monocular SLAM. Intelligent and Robotic Systems, Springer, Volume 61, issue 1-4, January, 2011. [ PDF ] | |
| D. Scaramuzza, A. Censi, K. Daniilidis. Exploiting Motion Priors in Visual Odometry for Vehicle-Mounted Cameras with Non-holonomic Constraints. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2011), San Francisco, September, 2011. [ PDF ] | |
| L. Doitsidis, A. Renzaglia, S. Weiss, E. Kosmatopoulos, D. Scaramuzza, R. Siegwart. 3D Surveillance Coverage Using Maps Extracted by a Monocular SLAM Algorithm. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2011), San Francisco, September, 2011. [ PDF ] | |
| L. Kneip, D. Scaramuzza, R. Siegwart. A Novel Parameterization of the Perspective-Three-Point Problem for a Direct Computation of Absolute Camera Position and Orientation. IEEE Conference on Computer Vision and Pattern Recognition (CVPR), Colorado Springs, USA, 2011. [ PDF ] [C/C++ code] | |
| L. Kneip, A. Martinelli, S. Weiss, D. Scaramuzza, R. Siegwart. A Closed-Form Solution for Absolute Scale Velocity Determination Combining Inertial Measurements and a Single Feature Correspondence. IEEE International Conference on Robotics and Automation (ICRA 2011), Shanghai, 2011. [ PDF ] |


2010
| D. Scaramuzza, F. Fraundorfer, and M. Pollefeys. Closing the Loop in Appearance-Guided Omnidirectional Visual Odometry by Using Vocabulary Trees. Robotics and Autonomous System Journal (Elsevier), Volume 58, issue 6, June, 2010. [ PDF ] | |
| L. Kneip, D. Scaramuzza, R. Siegwart. On the Initialization of Statistical Optimum Filters with Application to Motion Estimation. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2010), Taipei, October, 2010. C/C++ Code is available here. [ PDF ] | |
| D. Scaramuzza, L. Spinello, R. Triebel, R., Siegwart. Key Technologies for Intelligent and Safer Cars from Motion Estimation to Predictive Motion Planning. IEEE International Conference on Industrial Electronics, Bari, Italy, July, 2010. [ PDF ] | |
| S. Weiss, M. Achtelik, L. Kneip, D., Scaramuzza, R. Siegwart, . Intuitive 3D Maps for MAV Terrain Exploration and Obstacle Avoidance. International Conference on Unmanned Aerial Vehicles (UAV'10), Dubai, June, 2010. [ PDF ] | |
| G. Nuetzi, S. Weiss, D. Scaramuzza, R. Siegwart. Fusion of IMU and Vision for Absolute Scale Estimation in Monocular SLAM. International Conference on Unmanned Aerial Vehicles (UAV'10), Dubai, June, 2010. [ PDF ] | |
| D. Eberli, D. Scaramuzza, S. Weiss, R. Siegwart. Vision based Position Control for MAVs using one single Artificial Landmark. International Conference on Unmanned Aerial Vehicles (UAV'10), Dubai, June, 2010 [ PDF ] | |
| D. Sabatta, D. Scaramuzza, R. Siegwart. Improved Appearance-Based Matching in Similar and Dynamic Environments Using a Vocabulary Tree. IEEE International Conference on Robotics and Automation (ICRA 2010), Anchorage, Alaska, May, 2010. [ PDF ] | |
| F. Fraundorfer, D. Scaramuzza, M. Pollefeys. A Constricted Bundle Adjustment Parameterization for Relative Scale Estimation in Visual Odometry. IEEE International Conference on Robotics and Automation (ICRA 2010), Anchorage, Alaska, May, 2010. [ PDF ] | |
| M. Bloesch, S. Weiss, D. Scaramuzza, R. Siegwart. Vision Based MAV Navigation in Unknown and Unstructured Environments. IEEE International Conference on Robotics and Automation (ICRA 2010), Anchorage, Alaska, May, 2010. [ PDF ] | |
| S. Zingg, D. Scaramuzza, S. Weiss, R. Siegwart. MAV Navigation through Indoor Corridors Using Optical Flow. IEEE International Conference on Robotics and Automation (ICRA 2010), Anchorage, Alaska, May, 2010. [ PDF ] |
2009
| D. Scaramuzza, R. Siegwart, and A. Martinelli. A Robust Descriptor for Tracking Vertical Lines in Omnidirectional Images and its Use in Mobile Robotics. International Journal on Robotics Research, Volume 28, issue 2, February, 2009. [ PDF ] | |
| D. Scaramuzza, F. Fraundorfer, M. Pollefeys, R. Siegwart. Absolute Scale in Structure from Motion from a Single Vehicle Mounted Camera by Exploiting Nonholonomic Constraints. IEEE International Conference on Computer Vision (ICCV 2009), Kyoto, September-October, 2009. [ PDF ] | |
| M. Liu, D. Scaramuzza, C. Pradalier, R. Siegwart, Q. Chen. Scene Recognition with Omnidirectional Vision for Topological Map using Lightweight Adaptive Descriptors. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2009), St Louis, Missouri, USA, October 2009. [ PDF ] | |
| D. Scaramuzza, F. Fraundorfer, R. Siegwart. Real-Time Monocular Visual Odometry for On-Road Vehicles with 1-Point RANSAC. IEEE International Conference on Robotics and Automation (ICRA 2009), Kobe, Japan, May, 2009. [ PDF ] |
2008
| D. Scaramuzza, R. Siegwart. Appearance-Guided Monocular Omnidirectional Visual Odometry for Outdoor Ground Vehicles. IEEE Transactions on Robotics, Volume 24, issue 5, October 2008. [ PDF ] | |
| D. Scaramuzza, F. Fraundorfer, M. Pollefeys, R. Siegwart. Closing the Loop in Appearance-Guided Structure-from-Motion for Omnidirectional Cameras. European Conference on Computer Vision (ECCV'08), Eighth Workshop on Omnidirectional Vision (OMNIVIS'08), Marseille, France, October, 2008. [ PDF ] | |
| D. Scaramuzza, C. Pradalier, R. Siegwart. Performance Evaluation of a Vertical Line Descriptor for Omnidirectional Images. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2008), Nice, France, September 2008. [ PDF ] | |
| M. Rufli, D. Scaramuzza, R. Siegwart. Automatic Detection of Checkerboards on Blurred and Distorted Images. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2008), Nice, France, September 2008. [ PDF ] | |
| D. Scaramuzza. Omnidirectional Vision: from Calibration to Robot Motion Estimation. PhD thesis, ETH Zurich. Thesis no. 17635. Thesis advisor: Prof. Roland Siegwart. Committee members: Prof. Patrick Rives (INRIA Sophia Antipolis), Prof. Luc Van Gool (ETH Zurich). Chair: Prof. Lino Guzzella (ETH Zurich), Zurich, February 22, 2008. This thesis was awarded the Robotdalen Scientific Award (20,000 Euros), the most prestigious award for PhD theses in the field of robotics and automation (Robotdalen). [ PDF ] |
2007
| D. Scaramuzza, A. Harati, R. Siegwart. Extrinsic Self Calibration of a Camera and a 3D Laser Range Finder from Natural Scenes. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2007), San Diego, USA, October 2007. [ PDF ] | |
| D. Scaramuzza, N. Criblez, A. Martinelli, R. Siegwart. Robust Feature Extraction and Matching for Omnidirectional Images. Field and Service Robotics, Springer Tracts in Advanced Robotics Volume 42, pp 71-81, 2007. [ PDF ] |
2006
| D. Scaramuzza, A. Martinelli, R. Siegwart. A Toolbox for Easily Calibrating Omnidirectional Cameras. IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS 2006), Beijing, China, October 2006. [ PDF ] | |
| A. Martinelli, D. Scaramuzza, R. Siegwart. Automatic Self-Calibration of a Vision System during Robot Motion. IEEE International Conference on Robotics and Automation (ICRA 2006), Orlando, USA, May 2006. [ PDF ] | |
| D. Scaramuzza, A. Martinelli, R. Siegwart. A Flexible Technique for Accurate Omnidirectional Camera Calibration and Structure from Motion. IEEE International Conference on Computer Vision Systems (ICVS 2006), New York, USA, January 2006. [ PDF ] |
2005
| D. Scaramuzza, M. Vetterli. Sparse Codes for Natural Images. Technical Report, Ecole Polytechnique Federal de Lausanne, EPFL, Lausanne, Switzerland, October 2005. [ PDF ] | |
| D. Scaramuzza, A. Martinelli, R. Siegwart. Precise Bearing Angle Measurement Based on Omnidirectional Conic Sensor and Defocusing. European Conference on Mobile Robots (ECMR 2005), Ancona, Italy, September 2005. [ PDF ] | |
| D. Scaramuzza, S. Pagnottelli, P. Valigi. Ball Detection and Predictive Ball Following Based on a Stereoscopic Vision System. IEEE International Conference on Robotics and Automation (ICRA 2005), Barcelona, Spain, April 2005. [ PDF ] |
2004
| D. Scaramuzza Design and realization of a Stereoscopic Vision System for Robotics, with applications to tracking of moving objects and self-localization. Master Thesis, Department of Electronic and Information Engineering, University of Perugia, Perugia, Italy. This thesis won the Feberdcomin-Aica Award as the best 2004 Italian Master thesis in ICT. [ PDF Italian only] |