

Titus Cieslewski

|
MSc EPF Lausanne Robotics and Perception Group Department of Informatics University of Zurich |
Email: titus (at) ifi (dot) uzh (dot) ch Office: Andreasstrasse 15, AND 2.12 |
I am a Ph.D. student at the Robotics and Perception Group led by Prof. Davide Scaramuzza since January 2016. Currently, I am working on multi-agent SLAM and place recognition. I received my Bachelor's and my Master's degree in Microengineering from EPFL in 2012 and 2014, respectively. During my Bachelor's degree, I spent an exchange year at Carnegie Mellon University, Pittsburgh, USA. I did my Master Thesis at the Autonomous Systems Lab at ETH Zurich, where I spent one year as research assistant afterwards.
Research Interests
Multi-agent SLAM
Place Recognition
Publications
See also my Scholar profile.

Augmenting Visual Place Recognition with Structural Cues
IEEE Robotics and Automation Letters (RA-L), 2020.

AlphaPilot: Autonomous Drone Racing
Robotics: Science and Systems (RSS), 2020
Best Systems Paper Award!

Exploration Without Global Consistency Using Local Volume Consolidation
IFRR International Symposium on Robotics Research (ISRR), Hanoi, 2019.

SIPs: Succinct Interest Points from Unsupervised Inlierness Probability Learning
IEEE International Conference on 3D Vision (3DV), 2019.

Matching Features without Descriptors:
Implicitly Matched Interest
Points
British Machine Vision Conference (BMVC), Cardiff, 2019.

Are We Ready for Autonomous Drone Racing? The UZH-FPV Drone Racing Dataset
IEEE International Conference on Robotics and Automation (ICRA), 2019.

Challenges and implemented technologies used in autonomous drone racing
Springer: Intelligent Service Robotics Series

Data-Efficient Decentralized Visual SLAM
IEEE International Conference on Robotics and Automation (ICRA), 2018.

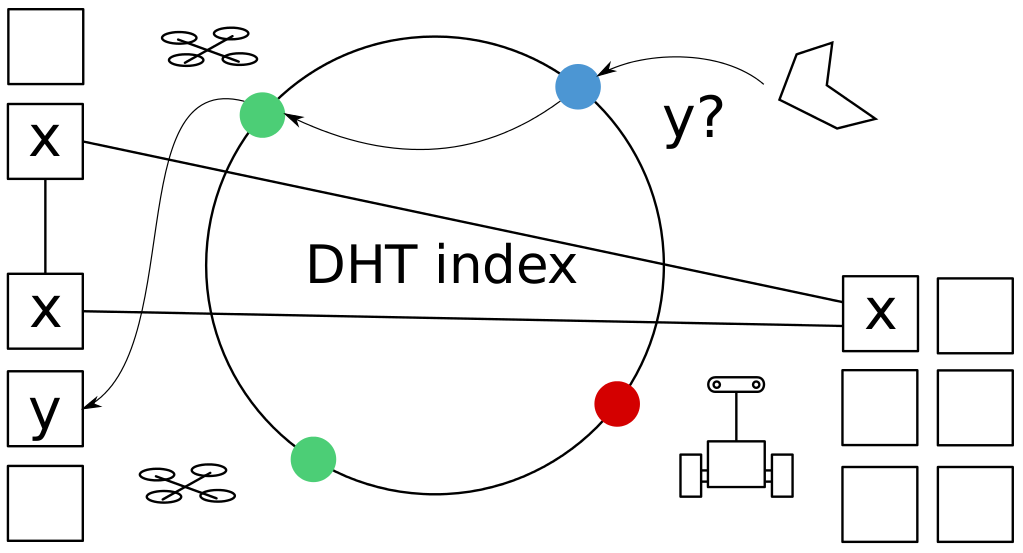
Efficient Decentralized Visual Place Recognition From Full-Image Descriptors
IEEE MRS 2017: the 1st International Symposium on Multi-Robot and Multi-Agent Systems

Rapid Exploration with Multi-Rotors: A Frontier Selection Method for High Speed Flight
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Vancouver, 2017.
IROS'17 Best Search and Rescue Robotics Paper Award Finalist!

Place Recognition in Semi-Dense Maps: Geometric and Learning-Based Approaches
British Machine Vision Conference (BMVC), London, 2017.

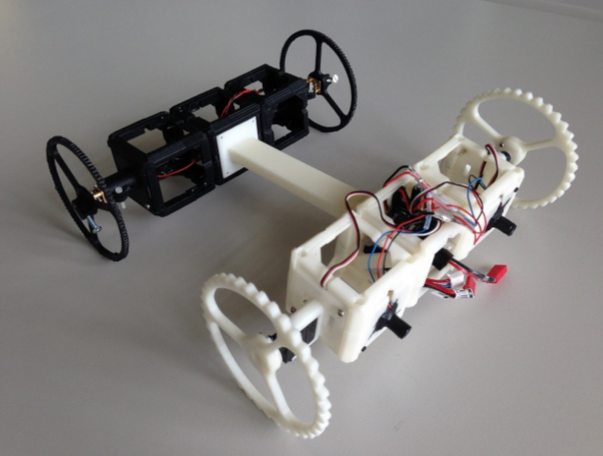
Dynamic Collaboration without Communication: Vision-Based Cable-Suspended Load Transport with Two Quadrotors
IEEE International Conference on Robotics and Automation (ICRA), 2017.

Efficient Decentralized Visual Place Recognition Using a Distributed Inverted Index
IEEE Robotics and Automation Letters (RA-L), Vol. 2, Issue 2, pp. 640-647, Apr. 2017.
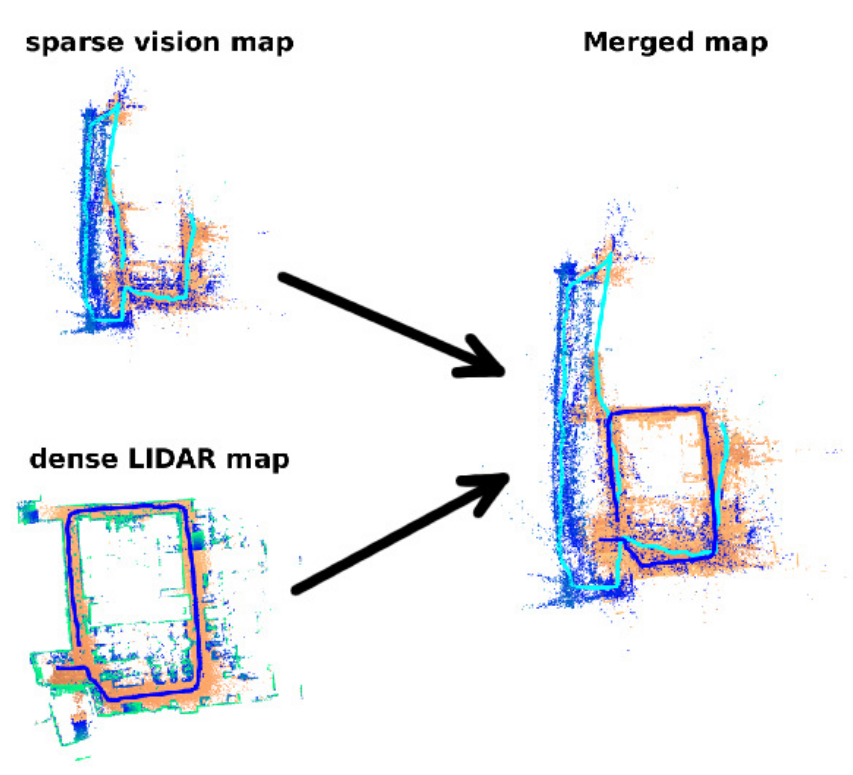
Structure-based Vision-Laser Matching
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, 2016.
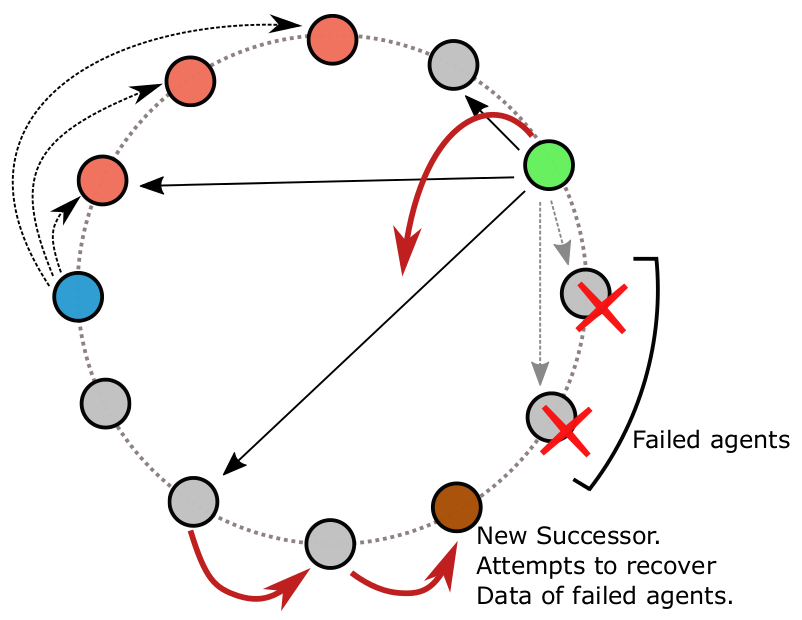
Robustness to Connectivity Loss for Collaborative Mapping
IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS), Daejeon, 2016.
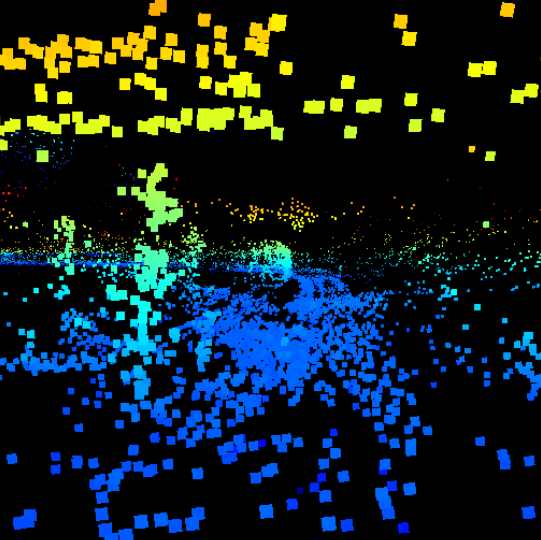
Point Cloud Descriptors for Place Recognition using Sparse Visual Information
IEEE International Conference on Robotics and Automation (ICRA), Stockholm, 2016.
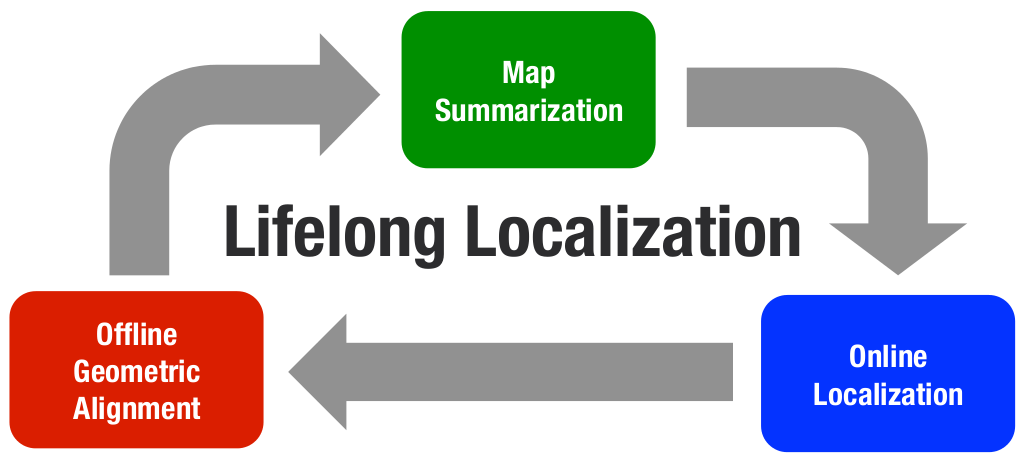
The Gist of Maps - Summarizing Experience for Lifelong Localization
IEEE International Conference on Robotics and Automation (ICRA), Seattle, 2015.
Map API - Scalable Decentralized Map Building for Robots
IEEE International Conference on Robotics and Automation (ICRA), Seattle, 2015.
RoboGen: Robot Generation through Artificial Evolution
International Conference on the Synthesis and Simulation of Living Systems (ALIFE), 2014.